SIAT新闻网
Nature Communications | 主动导航微型可调刚度机器人赋能介入手术 实现小腔道精准取样与靶向转运
在支气管、脑血管、输卵管等狭窄而曲折的自然腔道中开展微创介入手术,始终是临床实践中的重大挑战。理想的介入器械需要在不同操作阶段实现可控的力学响应:一方面,具备足够的柔顺性,以安全穿行于分叉和弯曲的腔道结构;另一方面,在相对笔直的通道或抵达目标区域时保持必要的刚度,以避免导管打卷并确保稳定操作。然而,现有微导管的力学性能大多在制造阶段便已固化,缺乏一种微型化、非破坏性且易于系统集成的动态刚度调节手段,难以适应介入路径中不断变化的机械环境。这一局限不仅增加了手术操作难度,也在一定程度上制约了微创介入技术在复杂腔道中的进一步应用。
近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所徐海峰研究员团队在磁控微米机器人导管领域取得重要进展。研究团队研发出一种基于磁性螺旋形机器人的微机器人系统(Helixoft),该系统可无缝集成至商用微导管中,首次在微米尺度实现了远程且无损的磁控可编程刚度调节,并兼具主动转向能力。该研究成果在Nature Communications上发表,论文题目为"Magnetically controlled microrobotic system for programmable stiffness tuning and active steering of microcatheters"。
为应对磁驱变刚导管在尺寸、安全性和远场操控方面的限制,Helixoft系统通过将刚性磁性螺旋结构与柔性微管相结合,实现了磁响应能力与机械顺应性的协同设计。基于“材料磁化—器件结构—磁场模式”三位一体的设计框架,研究团队构建了一种将磁驱螺旋运动与磁致弯曲相结合的解耦控制策略,在单一外部磁场作用下即可实现微导管刚度调节与主动转向的独立远程控制。该系统专为狭窄敏感的小腔道环境而设计,可集成至直径小至300微米的商用微导管中,实现跨越40倍范围的连续刚度调节。通过建立描述其力学行为的理论模型,实现对Helixoft微导管运动姿态的精确预测。此外,Helixoft微导管具备良好的功能扩展性,不仅支持多节段分布式、相互独立的刚度调节,还可集成微型摄像探头、电极或激光光纤等模块,为实时成像、组织消融和多模态微创介入操作提供支持。在多例活体动物支气管模型中,研究团队在Helixoft系统中集成了微型成像器件,并结合临床影像设备与自主搭建的导管推进机构,开展了基于双模态影像引导的磁控导航与靶向药物转运实验。通过血液炎症反应检测和组织学分析等系统性评估,验证了该系统在体内应用中的可行性与安全性。同时,还完成了输卵管离体器官模型中精准取样演示。
Helixoft微机器人系统为微创介入器械提供了一种全新的“机器人赋能”技术范式。通过在单一外部磁场作用下实现器械力学性能与运动形态的实时重构,该系统有望突破传统介入工具在复杂腔道环境中的操控瓶颈。其良好的可扩展性和系统兼容性,也为与成像、治疗及感知模块的深度融合奠定了基础。随着技术的进一步完善,Helixoft微机器人系统有望在精准取样、靶向递送及智能介入等应用场景中发挥重要作用,为下一代智能化、低损伤的微创介入手术提供新的技术支撑。
课题组刘源副研究员、博士研究生黄静和研究助理赵旭辉为共同第一作者,徐海峰研究员为本文独立通讯作者。本研究工作得到了国家自然科学基金优秀青年科学基金等项目的支持。
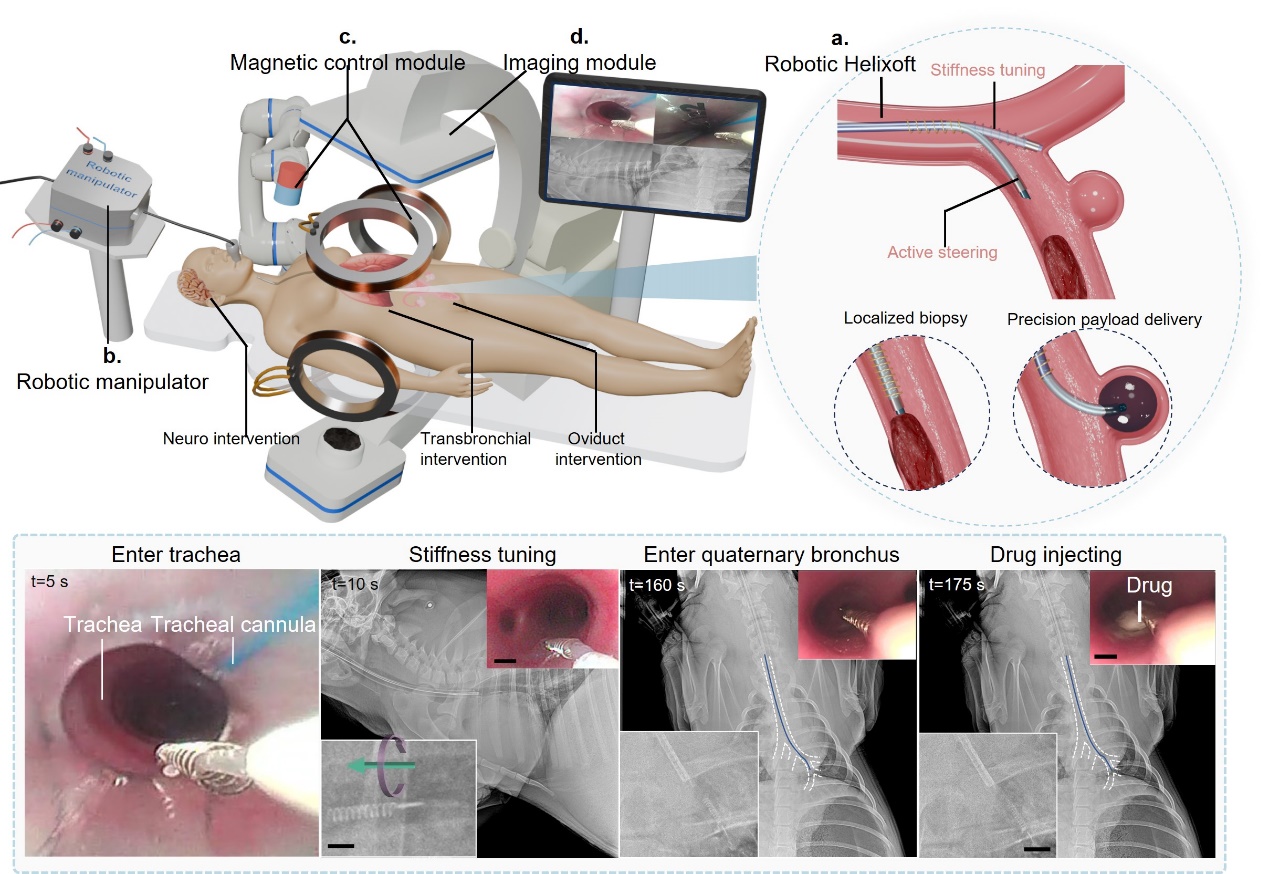
图1 具备磁驱远程变刚和主动导航能力的Helixoft介入机器人导管
附件下载:
