深圳先进院微型特种机器人研究取得新进展
近日,在国家自然科学基金、深圳市科创委学科布局的资助下,中国科学院深圳先进技术研究院集成所智能仿生中心徐天添副研究员工作组经过长时间努力,成功研究出了针对低雷诺数液体中磁控微型机器人的路径跟随方法,以及一套全新的多自由度磁控装置。该成果具有更高的控制准确性,并且支持人机结合交互式控制,使微型机器人技术更加贴近实际应用。相关结果Image-Based Visual Servoing of Helical Microswimmers for Arbitrary Planar Path Following at Low Reynolds Numbers(《用于低雷诺数液体中微型机器人平面路径跟随控制的图像伺服方法》)和The Hybrid System with a Large Workspace towards Magnetic Micromanipulation within the Human Head(《适用于头部范围内磁操纵的大空间混合磁控系统》)近日相继发表在2017年机器人领域顶级会议IEEE International Conference on Intelligent Robots and Systems(IROS,IEEE智能机器人与系统国际会议)上,前者已申请一项中国发明专利。两篇论文的作者关雁铭和Laliphat与徐天添副研究员一同在IROS会场对论文内容进行了报告和展示,与来自全世界的同领域研究者们进行交流和讨论。
微型机器人技术的研究是发展微创医疗、微操纵和微机电系统的重要技术手段之一,对促进新时代生产、医疗和生化实验技术的发展具有重要意义。而该领域内,灵活性和精确性是微型机器人操控技术的两大难点。难点一方面取决于控制系统的控制策略,另一方面取决于检测系统的精度和稳定性。经过国内外科研人员多年努力,在微型机器人的姿态控制和轨迹跟随上已有一批实验可行的方法,但其控制策略缺乏灵活性,难以在实际中实现。
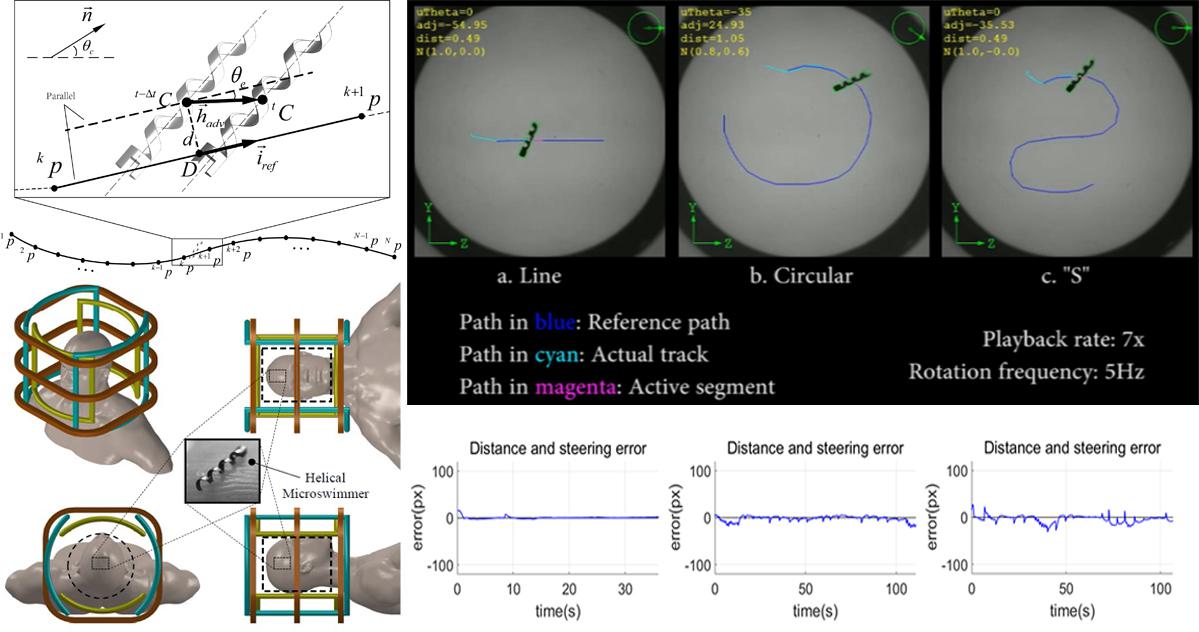
在该项研究中,徐天添工作组从应用的角度出发,结合例如眼部手术等实际需求,将基于图像的位置伺服技术(Image-based visual servoing, IBVS)与“用户自定义绘制”的交互式的路径给定以及存储方法相结合,达到“所见即所得”,在保证精度的前提下实现了具有应用价值的人机协同控制系统。该方法肯定了人在操纵过程中的核心地位,同时利用IBVS技术的稳定性和精确性,取长补短,达到像素量纲上任意轨迹跟随时最大误差小于微型机器人体长的3%,RMS误差小于5%。
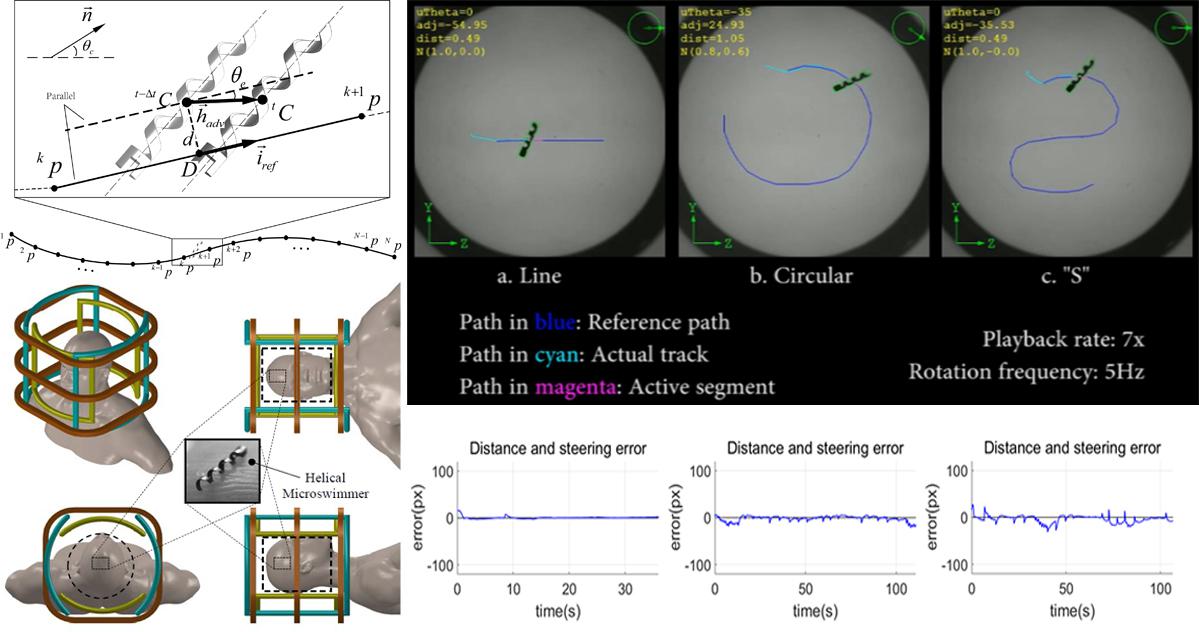
左上图为该路径跟随方法的模型描述,可见点列的路径存储方式;左下为多自由度磁控装置的3D建模示例;右上为路径跟随方法的监视器画面,可见用户通过鼠标等设备所绘制的深蓝色路径,以及微型机器人实际质心经过的浅蓝色路径;右下图为位置误差(微型机器人参考体长为300px)。